L3级自动驾驶的喧嚣刚刚随着奥迪的 “退赛”而暂入低潮,L4级的呼声已开始高涨起来。
近日,以“汽车安全领域领导者”自居的沃尔沃宣布,直接越过L3级而跨入L4级自动驾驶的研发,并计划在2年内实现L4车型的量产,并强调L4车型一定要使用激光雷达。

用沃尔沃集团CTO的话来说就是,激光雷达的应用是汽车迈向全自动驾驶的关键一步。
既然激光雷达是实现全自动驾驶的“关键一步”,那就是必不可少的一步。这一说法想必一定会得到国内外数十家激光雷达厂商的纷纷点赞。
所以,现在还来讨论高级自动驾驶要不要配备激光雷达的话题,似乎已经有些“不合时宜”了。
对于自动驾驶来说,估计再也没有比安全更重要的事情了。如果说摄像头、毫米波雷达等传感器能够保证99%的安全性,而加入激光雷达就能实现99.99999%的安全性的话,即使是这0.99999%的进步,对于很多想让自动驾驶汽车量产上路的车厂们也会毫不犹豫地使用。
但是熟悉自动驾驶领域的人们也知道,这一结论也并不是板上钉钉的一块,至少特斯拉老板的那句“用激光雷达的都是傻子”的话还没有改口。
在技术之争上,支持激光雷达的一派和支持纯视觉计算的一派还在吵得不可开交,同时也还有技术厂商试图用毫米波雷达来取代激光雷达。
可见激光雷达在高级自动驾驶所处的“C位”的地位仍然面临挑战。为什么大多数的自动驾驶公司都认可激光雷达技术?而偏偏又有少数公司不走“寻常路”,不接激光雷达的招?
个中原因嘛?既有传感器的技术路线之争,也有自动驾驶车企对商业路线的判断。自动驾驶的瓜田里总有新瓜待摘,这次我们围绕激光雷达与其他技术路线的纠葛来一起围观吃瓜。
激光雷达,如何成为自动驾驶传感器中的 “C位”担当?
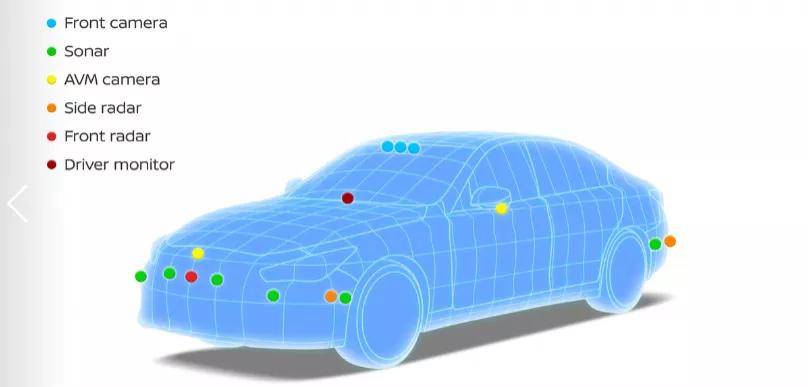
众所周知,目前自动驾驶汽车的传感器系统主要包括摄像头、毫米波雷达、激光雷达、超声波雷达等,而激光雷达几乎被公认为其中的“C位”担当。

激光雷达之所以能够得到这一殊荣,关键在于超高的分辨率、精度和强抗干扰能力的优势。
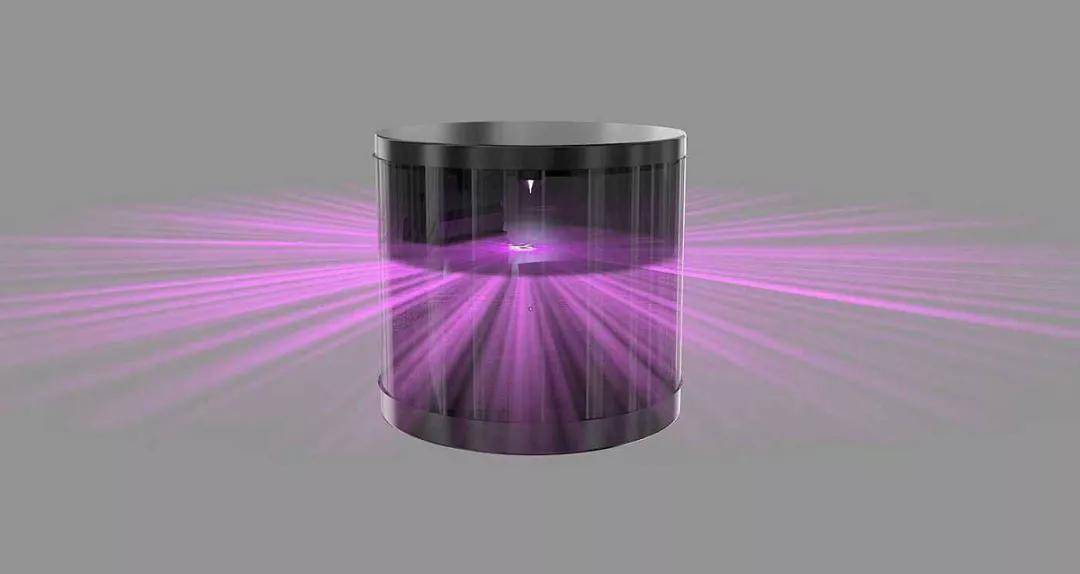
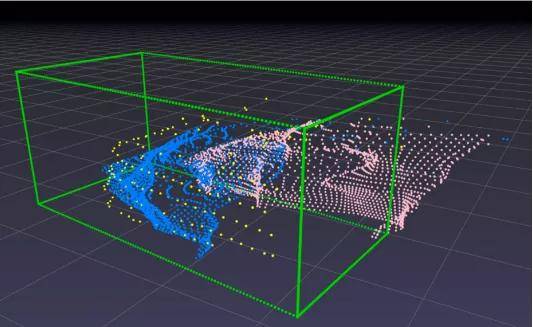
具体来说,激光雷达(LiDAR)是通过发射激光束来测量视场中物体轮廓边沿与设备间的相对距离,从而准确捕捉这些轮廓信息组成点云,并绘制出3D环境地图,测量精度可达到厘米级别。
首先,激光雷达发射的光波的频率比微波高出2-3个数量级,因此与微波雷达相比,具有极高的距离分辨率、角分辨率和速度分辨率,因此测量精度更高。
第二,测量精度更高,意味着可直接获取目标的距离、角度、反射强度、速度等信息,生成目标的立体维度图像,能够区分移动中的人是真实的行人,还是只是人物的平面海报。
第三,由于激光波长短,可发射发散角非常小的激光束,可探测低空/超低空目标;多路径效应小,抗干扰能力强。
此外,激光雷达不受光照条件和探测目标本身特性的影响,因此具有全天时工作的特性。
同时其缺陷也特别明显,那就是容易受到雨雪等恶劣大气条件或者有烟尘的环境影响,难以在全天候的环境里正常工作。这就意味着自动驾驶不能完全只依靠激光雷达,而必须依赖其他传感器的共同协助。
激光雷达最备受争议之处还在于其一直以来高过摄像头和毫米波雷达的成本价格。当然相较于一开始机械激光雷达动辄几万美元的价格,现在的固态激光雷达的售价已经能够降到数百美元,大大降低了激光雷达的应用成本。
具体而论,激光雷达的性能又跟线束的多少有关,线束越多其覆盖角度也越高,但同时其成本也越高。主流的自动驾驶汽车的激光雷达配置方案都是由一颗昂贵的64线激光雷达和多颗16线的激光雷达组成,而这些激光雷达的成本费用仍然是众多厂商不能承受之重了。
用马斯克的话说,“我不认为它(激光雷达)对于汽车的发展是有意义的,我认为它不是必须的。”
那到底是不是必须的,我们可以深入到“激光雷达”与“纯视觉计算”的两派相争的现场一探究竟。
技术性能VS商业成本,激光雷达与视觉计算各有胜负
站在激光雷达这一方的“选手”可谓人多势众,主流的自动驾驶厂商如谷歌 Waymo、通用 Cruise,再到国内的百度Apollo、 Pony.ai、文远知行等都是其拥护者。典型标志就是这些厂商的车顶上都有着非常扎眼的激光雷达设备。
而支持视觉计算技术的一方,主力队员就是已经成功量产售卖的特斯拉,理念相同的日产,以及一些自动驾驶技术解决方案的初创公司。
就在去年马斯克“大放厥词”的之后,分属两大阵营的两款新车的技术方案给了我们对比的可能。一款是日产基于ProPilot 2.0系统打造的Skyline(天际线)车型,一款是奥迪推出的基于Audi AI系统并以激光雷达为探测主体的奥迪A8L。
日产ProPilot 2.0系统在硬件上没有采用激光雷达,而是采用了5个毫米波雷达,12个超声波雷达,以及7个摄像头;而在前值摄像头上,采用了Mobileye提供的三目摄像头,实现了数据运算和传输速度的提升;另外加上GPS系统和三维高精度地图数据分析装置,构成了自动驾驶所需的360度观察体系。
相比较特斯拉Autopilot 系统只用了1台毫米波雷达系统,日产ProPilot 2.0直接增加到了5台,涵盖中长测距,可谓直接越过L2.5级的水平,达到其宣称的L3级自动驾驶。
而Audi AI则搭载了1台长测距探测雷达,4台中测距探测雷达、12台毫米波雷达以及Mobileye提供的前向摄像头;除此之外,在激光雷达上,Audi AI还使用了来自Valeo的四线激光雷达,可以非常精确地获取前方各类物体的信息。直观地比较,Audi AI在系统的冗余上和识别场景上都比ProPilot 2.0有优势。
其中,ProPilot 2.0主打高速封闭路段的全自动驾驶,尽管速度更高,但是场景单一,实现难度更小;而audi AI自动驾驶则放在了60KM/h以下的低速开放路段,但开放路段的场景复杂,突发情况更多,对系统的安全性要求更高,因此audi AI应用范围更广,更配得上L3级自动驾驶的水平。
那么这意味着采用激光雷达的audi AI的胜利吗?从技术的性能效果上,确实如此,而从商业成本上则是ProPilot 2.0占优。毕竟Skyline和奥迪A8L在价格上差着2倍多的差距,坚持视觉计算路线的ProPilot 2.0显然会有更大的商业空间。
那么,上升到更高一级的L4级自动计算,从技术的安全性和可靠性上,是否激光雷达已经稳操胜券,而纯视觉计算一方就再无机会呢?答案恐怕还是不确定。
纯视觉+毫米波,激光雷达N种可能替代方案
为什么还是不确定呢?因为在从技术解决方案迈向商业量产的路上,仍然横跨着诸多障碍。对于自动驾驶技术解决方案提供方来说,当然是系统的安全可靠性是排在第一位的,实现这一方向最简单方式就是不断“堆料”就可以,然而对于面向普通消费者的整车厂来说,除了稳定可靠,造车成本、造型美观度等都要统统放在和车辆安全同样的高度去考虑。
因此,像特斯拉这样的车厂对于车顶那个巨大无比又巨贵无比的激光雷达,心怀痛恨就不难理解了。所以,但凡有替代激光雷达的解决方案,对车企来说都是一件幸事。
目前来说,在L4以及更高级别的纯视觉计算方案上面,特斯拉以及个别技术企业仍在进行积极的探索。
在2018年,有一篇来自康奈尔大学的技术论文介绍了一种纯视觉技术架构的方法来实现激光雷达可以达成的性能效果。这一方法主要是改变了立体摄像机目标检测系统的 3D 信息呈现形式,将基于图像的立体视觉数据转换为类似激光雷达生成的3D点云,通过数据转换切换成最终的视图格式。因此被称之为伪激光雷达数据(pseudo-LiDAR)。
研究人员发现,以鸟瞰图而不是正视图来分析摄像机捕捉到的图像,可以将目标检测准确率提升2倍,从而使立体摄像机在目标检测方面的性能接近激光雷达,有可能成为激光雷达的可行替代方案,且其成本相比后者要低很多。
而特斯拉在最近举行的机器学习大会上透露,他们正在做 “伪激光雷达”的研究。在大会上,技术人员演示了通过少数几个摄像头达到传统激光雷达精度的方法的具体案例。其技术实现主要通过不同方向的摄像头进行图像拼接和视觉深度估计,再投影到鸟瞰图,就可以作为局部导航地图使用;同时,将画面的每个像素都进行深度估计,就像激光雷达点云一样,形成3D目标检测。
“伪激光雷达”的关键在于摄像头背后的先进的神经网络,可以充分理解输入的范围和质量。当然,伪激光雷达解决方案还需要实时的图像数据处理能力的硬件支持,以及要规避摄像头拍摄的图像清晰度以及光线问题,而这些也是特斯拉正在解决的问题。
当然在对高级别自动驾驶是否一定要用激光雷达的问题上,特斯拉并非孤家寡人。近日荷兰的恩智浦半导体首席CTO Lars Reger也给出了自己的判断。他认为激光雷达面临的成本高昂,特定场景失效以及损坏后维修代价高昂等问题,很可能成为L4-5级自动驾驶汽车上的“致命短板”;反而如果图像技术更为成熟的话,摄像头+毫米波雷达+V2X通信技术的组合,就可以取代激光雷达。
当然,除了纯视觉计算方案,一些硬件企业也在尝试利用毫米波雷达来代替激光雷达。我们知道,高频的毫米波雷达在探测距离上面要优越于激光雷达,但在角分辨率上弱于激光雷达。
来自爱尔兰的伊佳半导体芯片研发商Arralis已研发出一款车用毫米波雷达系统Corvus,计划应用于L5级自动驾驶上面。

据报道,Corvus雷达在探测范围、仰角分辨率和扫描面积等方面超过了目前市场上主流毫米波雷达,能够在水平±45°和垂直±7°,300米范围,对多个目标进行探测。探测距离要远远高于激光雷达的200米的水平,在角分辨率上达到激光雷达的水平。在L4级自动驾驶上,Corvus车用毫米波雷达已经达到可以代替激光雷达的能力。
Corvus雷达最直接的研发动力,就来自于车企的直接需求。即使新一代毫米波雷达的成本比市场上通用的短距雷达略高,但也将远低于激光雷达。
如果激光雷达所能实现的性能被纯视觉方案和毫米波雷达逐步替代,而其恶劣天气等应用场景的短板以及代价高昂的成本被克服,那么激光雷达确实就不再是车企们的一个必选项了。
回到当下自动驾驶技术与商业的交汇点上,激光雷达一定是未来L4级自动驾驶的主力担当,毕竟车企们是无法承受哪怕极小概率的自动驾驶安全隐患的,更何况激光雷达的成本价格随着竞争的加剧正在大幅下降,正在达到可以规模量产的边缘了。
而正如我们所看到的,激光雷达的前景也并非一片光明,特别是在纯视觉计算和毫米波雷达等技术路线里,仍然有着可能“取而代之”的技术潜力和商业可行性。
所谓天下武功,唯快不破。对于激光雷达来说,硬件的降价速度,能否快过这些替代解决方案的技术进步速度,就成为其未来市场前景的重要保障了。如果未来也就将至一颗毫米波雷达的价格,车企们也就不必纠结要不要多装几颗激光雷达了。
一切为了安全,自动驾驶的系统冗余设计还是要多多益善的。
